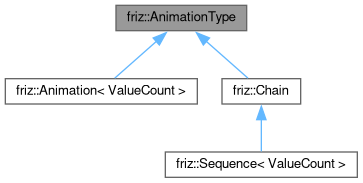
Abstract base class; all the real action happens in the derived templated Animation class, below.
More...
#include <animation.h>
|
|
CompletionFn | completionFn |
| | function to call when the animation is completed or canceled.
|
| |
|
|
int | animationId { 0 } |
| | optional ID value for this animation.
|
| |
|
int | preDelay { 0 } |
| | an optional pre-delay before beginning to execute the effect.
|
| |
Abstract base class; all the real action happens in the derived templated Animation class, below.
◆ CompletionFn
callback on completion of this effect
- Parameters
-
| int | id – ID of this animation. |
| bool | wasCanceled – true if the completion is because of cancellation. |
◆ Status
| Enumerator |
|---|
| processing | The animation is running right now.
|
| finished | Finished running, okay to clean up.
|
◆ cancel()
| virtual void friz::AnimationType::cancel |
( |
bool |
moveToEndPosition | ) |
|
|
pure virtual |
Cancel an in-progress animation, optionally moving directly to its end value.
- Parameters
-
| moveToEndPosition | if true, go immediately to the end value. |
Implemented in friz::Animation< ValueCount >, and friz::Chain.
◆ getId()
| int friz::AnimationType::getId |
( |
| ) |
const |
|
inline |
◆ getValue()
| virtual AnimatedValue * friz::AnimationType::getValue |
( |
size_t |
index | ) |
|
|
pure virtual |
◆ gotoTime()
| virtual Status friz::AnimationType::gotoTime |
( |
juce::int64 |
timeInMs | ) |
|
|
pure virtual |
Advance all active animations to this point in time.
- Parameters
-
| timeInMs | Time since some fixed event; only used internally to calculate deltas. |
- Returns
- Status either processing or finished.
Implemented in friz::Animation< ValueCount >, and friz::Chain.
◆ isFinished()
| virtual bool friz::AnimationType::isFinished |
( |
| ) |
|
|
pure virtual |
◆ isReady()
| virtual bool friz::AnimationType::isReady |
( |
| ) |
const |
|
pure virtual |
◆ onCompletion()
| void friz::AnimationType::onCompletion |
( |
CompletionFn |
complete | ) |
|
|
inline |
Set the (optional) function that will be called once when this animation is complete. completionFn is public, so you can also just assign to it directly.
- Parameters
-
| complete | CompletionFn function. |
◆ setDelay()
| void friz::AnimationType::setDelay |
( |
int |
delay | ) |
|
|
inline |
Set a number of frames to delay before starting to execute this animation.
- Parameters
-
◆ setValue()
| virtual bool friz::AnimationType::setValue |
( |
size_t |
, |
|
|
std::unique_ptr< AnimatedValue > |
|
|
) |
| |
|
inlinevirtual |
The documentation for this class was generated from the following file: